技术详情
成果简介:本技术研究开发了一套能够应用在超高压变电站内,完全取代人工,实现变电站园区内的自动抄表、信息采集与检测、危险源监测与排查、设备运行状态监测的智能机器人,并建立起一套完整的监测系统及监测规范。具体成果如下:
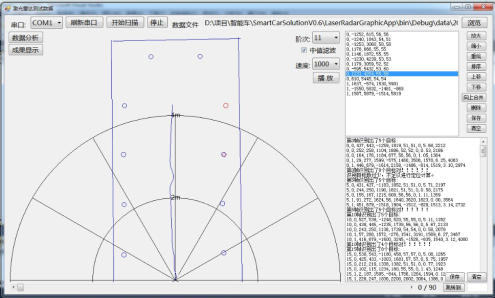
(1)可通过激光雷达对机器人周围的地面物体进行探测、分析和识别,并通过几何图形表示地面物体,从而建立起高精度的二维地图;
(2)可采用高精度GPS实时获取机器人的准确位置和航向,精确控制机器人严格按照事先预定的线路行进,并可在指定位置完成各种数据采集任务;
(3)可应用高清摄像头对工业现场安装的各种仪器仪表进行图像采集,并通过后台的智能图像分析和识别算法,准确识别出各种模拟/数值仪表的当前读数;
(4)通过采用多种抗干扰设计和措施,有效解决了超高压变电站强电磁场环境对无线数据传输造成的应用,实现了实时高清视频数据的无线传输。
关键技术:
(1)基于激光雷达的二维地图重建;
(2)机器人的精确定位及自主导航;
(3)仪器仪表图像数值的自动识别;
(4)强干扰环境下的高速无线数据通信。
实施条件:需对机器人行进路线周围环境进行一定程度的改造,加装识别桩,易于机器人进行识别,从而判断自身的当前位置和行进方向。