科技成果库
SCIENTIFIC AND TECHNOLOGICAL ACHIEVEMENTS LIBRARY
基于CAN总线的嵌入式皮带运输控制系统
发布日期:2019-12-24 | 浏览:次
技术详情
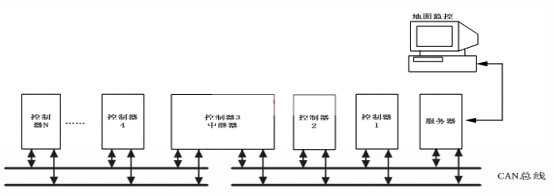
针对当前井下皮带运输系统的现状,运用CAN总线技术和嵌入式技术研发集中监控分布式控制的自动化系统;综合实际现场的生产流程和监控需求分析,研究设计皮带运输监控系统的主要结构及系统软硬件;利用最新的组态软件工具实现上位机的集中监控。通过本项目的研究探索建立一套适用于煤矿皮带运输系统的基于CAN现场总线和嵌入式系统的自动化系统,解决现有的集散控制中对控制器要求高的问题,在皮带监控系统的实用性和通用性方面取得突破。
主要研究内容如下:
(1)研究分析现有煤矿皮带运输系统的主要设备和工作流程,提出监控系统的整体设计方案,主要是系统组成结构和操作方式的设计。
(2)研究CAN总线技术在皮带运输控制系统中的应用。参照CAN总线的原理及其协议, 通过嵌入式技术,完成主从智能节点的设计,保证主从处理器之间的基本通讯,实现在硬件层次上节点之间的数据传输。
(3)研究设计上位机远程监控子系统,使上位机通过现场总线与下位机进行数据通信,并利用组态软件开发出相应的动态监控界面,实现流程运行状态、流程设备启/停状态的实时监控,同时实现实时数据处理、运行报警、安全策略等多种功能。