技术详情
(技术特点、主要技术参数、应用范围、市场前景、效益分析等)
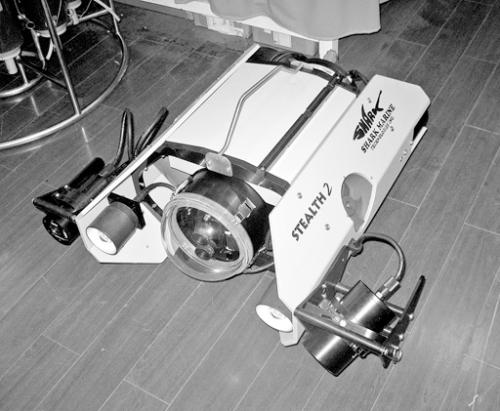
无人遥控潜水器(ROV)是一种靠脐带缆来供应能源和交换信号的无人潜水器,操作者在水上控制和操作,广泛应用于海洋资源开发、水下工程、海底调查、打捞作业等领域。本项目开发的ROV具有体积小、质量轻、价格低廉等优点;同时采用八推进器矢量推进方式和多传感器融合智能算法,使其具有全自由度灵活运动的特点,解决了小型ROV在不确定流场下的自稳定问题,大大降低了小型ROV的操作度;并将图像识别和跟踪功能融合其中,可以实现对水下运动物体自动探测和跟踪作业。
案例描述
回报级:收回全部投入后开始赚钱再投入。利润级:开始盈利且利润超过总投入的10%。盈亏级:销售量达到盈亏平衡点。销售级:第一笔销售收入到账。系统级:产品实际通过任务运行的成功考验。产品级:批产合格、图纸完备、工艺成熟。环境级:例行试验抽样、整架连通、试验结束。正样级:测试合格、工艺固化、图纸修改完成。初样级:完成图纸设计、工艺编制、调试完备。仿真级:在实验室关键功能仿真验证结论成立。功能级:关键功能分析目前能够做到。方案级:提出的技术概念原理方法论证可行。报告级:知识积累后有了新想法且表述出来。
适用对象
原材料、设备、厂房、动力、土地、人力资源、环保、周围环境