技术详情
(技术特点、主要技术参数、应用范围、市场前景、效益分析等)
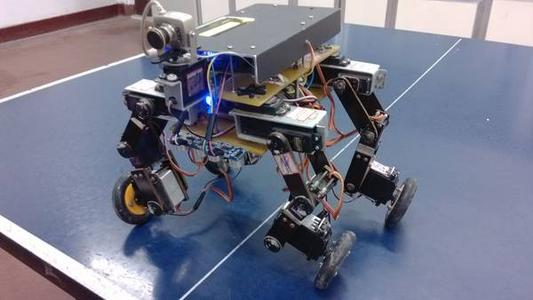
本项目针对我国地震、泥石流、滑坡、洪水等重大灾害发生时的应急救援装备需求,研制一套灾害现场救援信息采集机器人系统。该机器人采用履带式运动方式,结合被动自适应变形机构,可以根据路面的不同状况通过自身机构调节改变运动姿态,适用于多种复杂路面环境,可搭载多种救援功能模块(包括:有毒气体检测模块、生命体特征探测模块、营养液输送模块、双向语音、视频模块等),实现灾害现场的信息采集,为指挥中心提供决策依据。
灾害现场的救援是一项时间紧迫、危险度高、异常复杂的工作,需要耗费大量的人力、物力和财力。该项目研究的灾害现场救援信息采集机器人系统可以通过携带的传感器有效进行信息采集和搜寻被困者的位置,实现对灾害现场的立体化搜索和救援,可以大规模投入国家灾害现场应急救援队的现场工作中。项目极大程度的降低了灾害现场救援的成本,提高搜救的效率和救援人员的安全系数。
案例描述
回报级:收回全部投入后开始赚钱再投入。利润级:开始盈利且利润超过总投入的10%。盈亏级:销售量达到盈亏平衡点。销售级:第一笔销售收入到账。系统级:产品实际通过任务运行的成功考验。产品级:批产合格、图纸完备、工艺成熟。环境级:例行试验抽样、整架连通、试验结束。正样级:测试合格、工艺固化、图纸修改完成。初样级:完成图纸设计、工艺编制、调试完备。仿真级:在实验室关键功能仿真验证结论成立。功能级:关键功能分析目前能够做到。方案级:提出的技术概念原理方法论证可行。报告级:知识积累后有了新想法且表述出来。